Cấu tạo chi tiết Robot Melfa Assista
Robot Melfa được cấu tạo bởi nhiều thiết bị với nhau và mỗi thiết bị đều có thông số kỹ thuật riêng. Hãy để AUEVN trình bày cho bạn các thông số kỹ thuật chi tiết của các bộ phận này nhé.

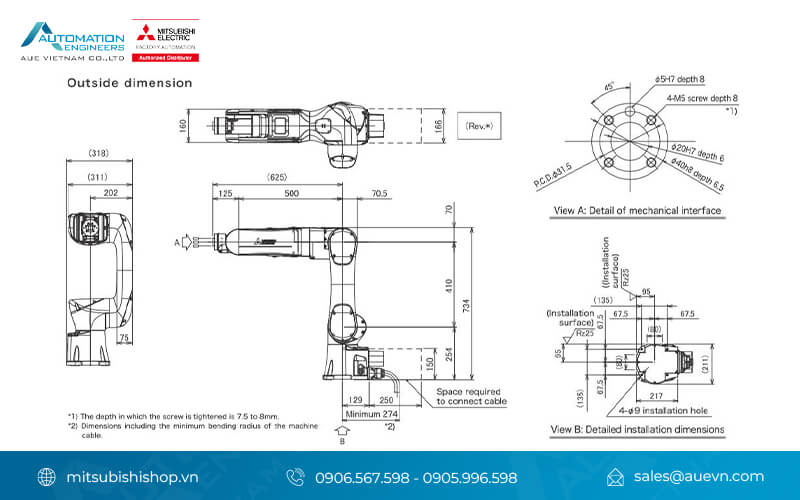
Cánh tay Robot Melfa Asista RV-5AS-D
| Tiêu chí | Đơn vị | Thông số | |
| IP Rate | IP54 | ||
| Degree of freedom | 6 | ||
| Installation posture | Floor mounted/ceiling mounted | ||
| Structure | Vertical, multiple-joint type | ||
| Operating range | Waist (J1) | Degree | ±240 |
| Shoulder (J2) | ±148 | ||
| Elbow (J3) | ±150 | ||
| Wrist twist (J4) | ±200 | ||
| Wrist pitch (J5) | ±120 | ||
| Wrist roll (J6) | ±200 | ||
| Speed of motion | Waist (J1) | Degree/s | 124 (59.6) |
| Shoulder (J2) | 124 (34.0) | ||
| Elbow (J3) | 124 (34.0) | ||
| Wrist twist (J4) | 297 (142) | ||
| Wrist pitch (J5) | 356 (215) | ||
| Wrist roll (J6) | 360 | ||
| Maximum reach radius | mm | 910 | |
| Maximum resultant velocity | High-speed operation mode | mm/sec | 1,000 |
| Collaborative operation mode (Standard operation) | 250 | ||
| Collaborative operation mode (Low-speed operation) | 50 | ||
| Load | Rating | kg | 5 |
| Maximum Note3) | 5.5 | ||
| Pose repeatability | mm | ±0.03 | |
| Ambient temperature | °C | 0 to 40 | |
| Mass | kg | 32 | |
| Wiring | Hand I/O | – | Mechanical interface: 2 inputs/4 outputs Forearm: 6 inputs/0 outputs Base: 0 inputs/4outputs |
| Force sensor cable/Spare cable | – | 5-conductor (24 V/0.7 A) One of the conductors should be used for the frame ground (FG). | |
| LAN cable | – | Cat-5e supported | |
| Plumbing | Primary hoses | – | Φ6x 2 |
| Secondary hoses | – | Φ4 x 4 From the base of the robot to the elbow. | |
| Supply pressure | MPa | 0.54 | |
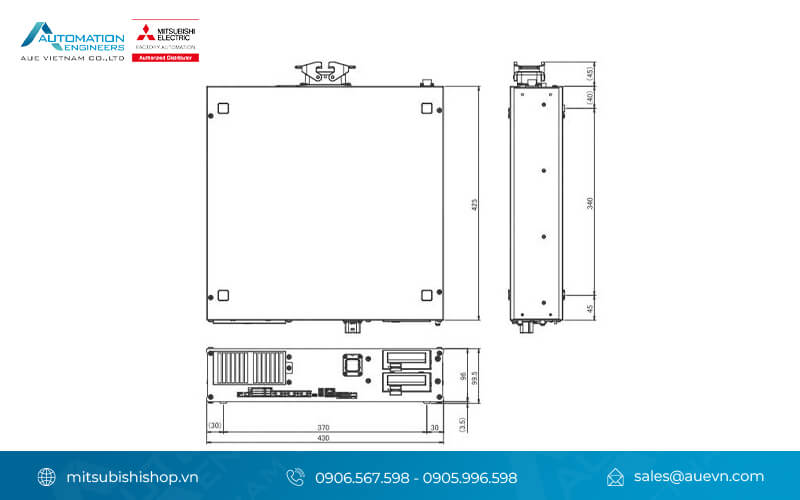
Bộ điều khiển CR800 – 05VD
Đi kèm với cánh tay robot là bộ điều khiển (controller) giúp dễ dàng kiểm soát và lập trình hoạt động của cánh tay.
| Tiêu chí | Đơn vị | Thông số | Ghi chú | |
| Number of control axis | – | Simultaneously 6 | – | |
| Memory capacity | Programmed positions | point | 39,000 | Number of program blocks when using RT VisualBox 2000 (vision sensor not used), 1800 (vision sensor used) Number of programs:505 (vision sensor not used) less than 500 (vision sensor used) |
| No. of steps | step | 78,000 | ||
| Number of program | – | 512 | ||
| Robot language | – | MELFA-BASIC VI | – | |
| Teaching method | – | Pose teaching method, MDI method | – | |
| External input and output | Input/output | point | 0/0 | Max. 64/64 by option |
| Dedicated input/output | – | Assigned with general-purpose input/output | The signal number of “STOP” input signals is fixing, | |
| Emergency stop input | point | 1 (duplicated) | ||
| Emergency stop output | point | 1 (duplicated) | ||
| Mode selector switch input | point | 1 (duplicated) | ||
| Mode output | point | 1 (duplicated) | ||
| Robot error output | point | 1 (duplicated) | ||
| Door switch input | point | 1 (duplicated) | ||
| Encoder input | Channel | 2 | – | |
| Safety I/O | point | 8 (duplicated) / 4 (duplicated) | Safety extension unit | |
| Interface | Force sensor interface | Channel | 1 | – |
| Remote input/output | Channel | 1 | For connection to the Safety extension unit | |
| USB | port | 1 | Ver. 2.0 HighSpeed device functions only. USB mini-B | |
| Ethernet | 1 | For customer 1000BASE-T/ 1008ASE-TX/10BASE-T | ||
| port | 1 | Dedicated T/B port: 100BASE-TX/10BASE-T | ||
| Option slot | slot | 2 | For option interface | |
| SD memory card slot | slot | 1 | For extended memory | |
| RS-422 | port | 1 | Dedicated T/B port | |
| Power source | Input voltage rang | V | Single phase AC 100 to 120 Single phase AC 200 to 230 | The rate of power-supply voltage fluctuation is within 10% |
| Power capacity | kVA | 1.0 | Does not include rush current | |
| Power supply frequency | Hz | 50/60 | – | |
| Outline dimensions | mm | 430(W) x 425(D) x 99.5(H) | Excluding protrusions | |
| Mass | kg | Approx. 12.5 | – | |
| IP Rate | IP20 | |||
| Ambient temperature | °C | 0 to 40 | Without freeze | |
| Ambient humidity | %RH | 45 to 85 | Without dew drops | |
| Grounding | Ω | 100 or less | Class D Grounding None | |
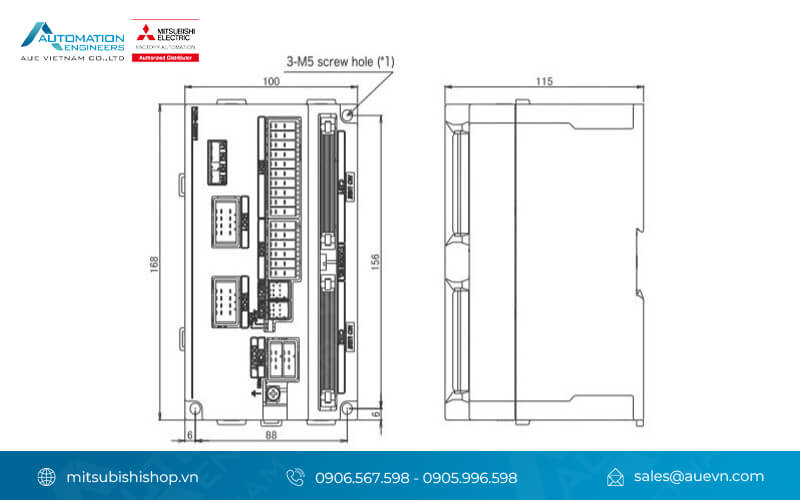
Bộ mở rộng an toàn
Ngoài ra trong bộ robot Melfa Assita còn có thêm Bộ mở rộng an toàn (Safety extension unit) có tác dụng ngăn
| Tiêu chí | Mô tả | Ghi chú | ||
| Safety function | STO function | The function electrically shuts off the driving energy to the motor of the robot arm. | IEC 60204-1 Corresponds to stop category 0 | |
| SS1 function | The function to control and decelerate the motor speeds of the robot. After stopping the robot transitions to the STO state. | IEC 60204-1 Corresponds to stop category 1 | ||
| SS2 function | The function to control and decelerate the motor speeds of the robot. After stopping the robot transitions to the SOS state. | IEC 60204-1 Corresponds to stop category 2 | ||
| SOS function | Without shutting off the driving energy to the motors, this function monitors the robot so that it stays at rest. | When SOS, SLS SLP. and STR detect error, activate SS1. EN 61800-5-2 compliant |
||
| SLS function | This is a function to monitor each part of the robot arm so that their speeds do not exceed monitoring speeds. | |||
| SLP function | The function monitors specified monitoring positions so that they do not go across position monitoring planes. | |||
| STR function | This function ensures that the torque limits of each motor in the robot are not exceeded | |||
| Safety performance | Standard | EN ISO 10218-1: 2011
ISO/TS 15066: 2016 EN ISO 13849-1: 2015 IEC 61800-5-1: 2007 EN 61800-5-2: 2017 EN 61000-6-7: 2015 EN 61326-3-1: 2017 IEC 61508-1: 2010 IEC 61508-2: 2010 IEC 61508-3: 2010 EN 62061: 2005/A2:2015 IEC 62061: 2005/AMD1: 2012/AMD2: 2015 |
– | |
| Performance | STO | SIL2, PLd/Category 3 (at factory settings) SIL3, PLe/Category 4 (with changes to parameters) | – | |
| SS1,SOS,SS2, SLS,SLP,STR | SIL 2, PLd/Category 3 | – | ||
| Dangerous failure rate | STO | PFH = 1.40×10 [1/h] | – | |
| SS1,SS2,SOS | PFH = 3.42x 10-7 [1/h] | – | ||
| SLS | PFH = 3.42x 10-7 [1/h] | – | ||
| SLP | PFH = 3.42X 10-7 [1/h] | – | ||
| STR | PFH = 3,62X 10 [1/h] | – | ||
| Safety extension unit | Power supply specifications | Voltage | 24 V DC 5-5% Ripple 0.2 V (P-P) | Supplied by customer |
| Maximum consumption current | 300 mA | – | ||
| IP Rate | IP20 | – | ||
| Weight | 0.8kg | – | ||
| Environment | Operating temperature range | 0 to 40°C | It must be kept away fromheat appliances and other heat sources | |
| Relative humidity | 45 to 75% | Without drew drop | ||
| Input signal | 8 routes (duplicated signal) | |||
| Output signal | 4 routes (duplicated signal) | |||
Ưu điểm nổi bật Robot Melfa Assista
- Tính linh hoạt: Thích nghi với nhiều môi trường và ứng dụng khác nhau
- Tính an toàn: Cảm biến an toàn, giảm lực và hệ thống kiểm soát an toàn
- Hiệu quả năng lực: Tăng cường hiệu suất và năng suất công việc trong nhiều lĩnh vực
- Tích hợp công nghệ hiện đại: tích hợp trí tuệ nhân tạo, học máy và điều khiển tự động
- Tiết kiệm chi phí: Giảm chi phí lao động, tăng cường độ chính xác.